

NH-SDAS絞吸式挖泥船控制系統(tǒng)
NH-SDAS絞吸式挖泥船控制系統(tǒng)
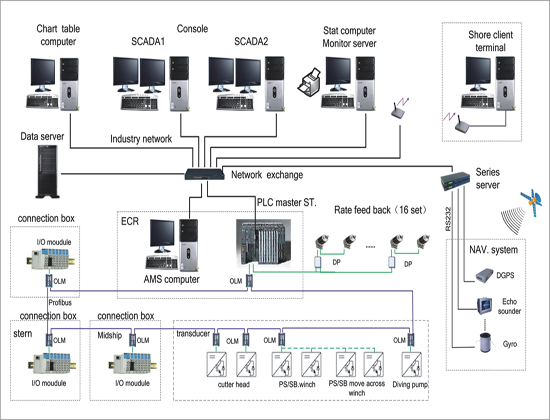
絞吸控泥船疏??刂葡到y(tǒng)是一套集成化的網(wǎng)絡(luò)系統(tǒng),包括硬件系統(tǒng)(信號采集模塊、PLC控制網(wǎng)絡(luò)、計算機、網(wǎng)絡(luò)及網(wǎng)絡(luò)設(shè)備等)和軟件系統(tǒng)(計算機軟件、PLC軟件),由上下兩層網(wǎng)絡(luò)構(gòu)成。下層網(wǎng)絡(luò)是直接面對控制結(jié)旬的現(xiàn)場總線系統(tǒng),負(fù)責(zé)對現(xiàn)場信號進(jìn)行采集和控制。上層網(wǎng)絡(luò)系統(tǒng)(TCP/IP工業(yè)以太網(wǎng))是實現(xiàn)數(shù)據(jù)運算,數(shù)據(jù)存儲、數(shù)據(jù)傳輸和數(shù)據(jù)共享功能的計算機網(wǎng)絡(luò)系統(tǒng),兩個網(wǎng)絡(luò)之間基于工業(yè)以及網(wǎng)信息交換。
操作人員在船橋通過對鋼樁臺車、橫移較車、絞刀架絞車的操縱、控制船舶前移、后移、船舶的左右橫移和鉸刀的上升和下降時,挖泥顯示裝置褚監(jiān)視整個過程,在監(jiān)視閭上用模擬圖顯示船舶、絞車的位置變化,同時用數(shù)字方式將數(shù)據(jù)顯示出來,使縱人員能遠(yuǎn)程控制和了解船舶和鉸刀狀態(tài)。
通過吃水變送器可知道鉸刀架軸心處的吃水深度。
通過電羅經(jīng)可以了解船舶相對旋轉(zhuǎn)角度,計算鉸刀的橫移速度。
通過鋼樁位移傳感器,可以了解鋼樁臺車的狀態(tài)。
通過垂直角度傳感器及吃水傳感器計算鉸刀在水下的深度。
挖泥超深報警及挖泥左右界限超寬報警。
上一個:
船橋綜合監(jiān)控系統(tǒng)
下一個:
NH-IMS船舶綜合信息系統(tǒng)


版權(quán)所有@ 武漢南華工業(yè)設(shè)備工程股份有限公司